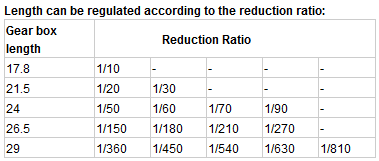
PIC Fan controller
This project it´s based on a
PIC16F877A, with the purpose of control a FAN
with PWM (Pulse with Modulation). It offers a
variable speed control, low acoustic noise,
reliability, long lifetime, low power
consumption, protection features. The MCU get
the temperature from the sensor (D18B20), and
after will do a conversion Celsius degrees and
then it´s generated a PWM on PORTC.2 with 6
different levels.
PWM
|
TEMPERATURE
|
15%
|
<= 49°
|
30%
|
50°
|
40%
|
51°
|
50%
|
52°
|
75%
|
53°
|
100%
|
>54°
|
After the signal goes to
Q1 (BC338) in order to control the duty cycle in
the fan. I had to use two transistors to have an
Ic on Q2 to be enough to activate the fan.
Because the MCU only generate a maxim of 3.6V on
which output, and 15% of 3.6V is 0.5V to
polarize Q1 we need 0.7V.
How to calculate
the Q1 and Q2:
You will be
able to control the FAN between 5V and
+/-12V.The BC338 have a current load of
800mA that is value of a fan can have, you
can use two or more fans as long the current
load isn´t more than 800mA. The output of
MCU connect to the Q1 and Q2 it works like a
switch, the D3 it´s for protection from the
magnetic field in the inductors from the
FAN, without the D3 when you turn off the
system the current will be discharge to the
Q2 and could damage it.
Connectors
|
J1
|
Expansions PORTS
|
Source
|
12V
|
Sensor
|
D18B20
|
FAN
|
Connect the FAN
|
ICSP
|
To program with PICKIT2
|
Pictures:
Link
















































{kind=link}